發布日期:2022-10-09 點擊率:123
二極管作為電子元件中具有兩個電極的元件,它的電流流向只有單向。二極管鉗位電路的鉗位之意,就是鉗制輸入電壓峰值在預定電平輸出電壓,此過程不會改變信號。而二極管穩壓電路因使用穩壓二極管,俗稱穩壓管或齊納管。穩壓管穩壓二極管利用pn結反向擊穿狀態,能夠在電壓保持不變的情況下,允許電流在一定的大范圍內變化。
對于鉗位電路二極管跟穩壓電路二極管很多人看了資料卻依舊無法理解。其實,要理解穩壓及鉗位電路二極管,需要先弄懂二極管伏安特性曲線。
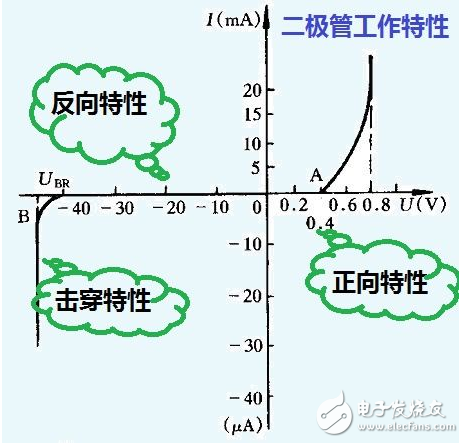
我們發現,當正向電壓從零開始上升,在0.4V之前,二極管的正向電流很小。但從0.7V開始,電流迅速增加。
我們發現,我們發現,反向電壓一直到達-40V時,反向電流也即反向漏電流近乎為零。
這說明,二極管的正向電壓大于0.7V后,其等效電阻很小,這叫做二極管的正向特性;二極管的反向特性是反向電阻很大。
我們來看下圖:
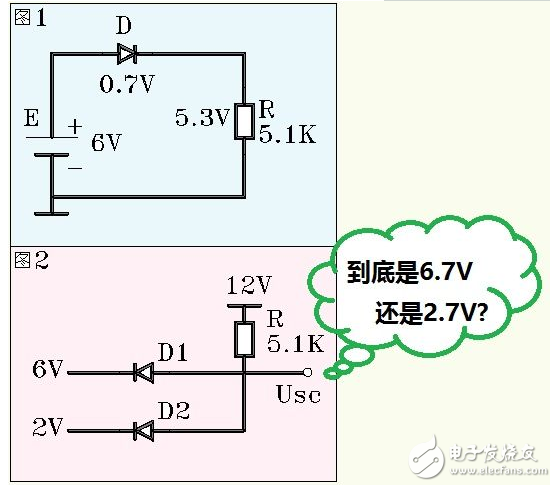
我們先來看圖1:
圖1中,二極管處于正向接法,它的管壓降是0.7V。因此,電阻R上的電壓為:
UR=6-0.7=5.3V
那么流過電阻R的電流呢?
IR=5.3/5.1=1.04mA
現在我們再來看圖2:
我們看到,兩只二極管的正極都接到12V,因此兩只二極管都屬于正向接法。于是,D1二極管的正極應當是6+0.7V=6.7V,D2二極管的正極應當是2+0.7=2.7V。那么電路的輸出端電壓Usr到底是多少呢?
假設Usc=6.7V,于是二極管D2將處于正向接法。又因為二極管D2的壓降是0.7V,因此二極管D2的正極將會被強制性地拉到2.7V。如此一來,二極管D1將處于反偏狀態,即D1的負極電壓比正極電壓高。
注意:D2導通后,D1的正極變成2.7V,同時D1的負極是6V,因此D1被反向偏置而截止。
也就是說,輸出電壓Usc被強制性地鉗位在2.7V。哪個電壓低,電路的輸出電壓就是低電壓再加上0.7V。
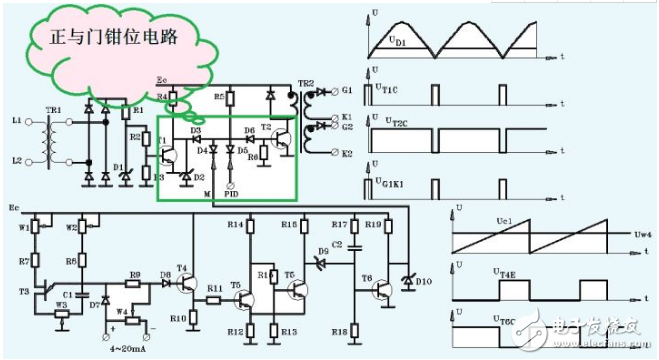
此圖是一套用于控制晶閘管觸發的電路。按圖示我們能看到用正與門構成的鉗位電路。三個輸入端分別是測控端電壓、PID控制和觸發脈沖電路。
測控端電壓電路正常輸出是脈動直流,高電平的占空比較大;PID控制輸出也是高的電平,而觸發脈沖則輸出正負交替的高電平脈沖。可見,在正常情況下,與門的輸出由觸發脈沖來決定,畢竟零電平也是脈沖的一部分。
可見,鉗位電路的應用還是很廣泛的。
再談談穩壓二極管。
我們看上圖的測控端電壓電路:
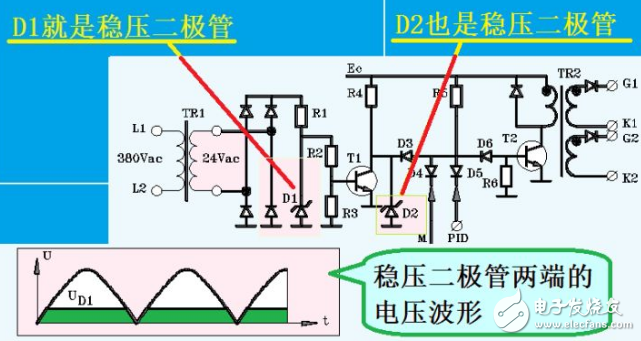
設變壓器的初級電壓為380Vac,次級為24Vac,于是經過橋式整流后,其平均電壓為0.9X24=21.6V,屬于脈動直流。但實際計算時不能這樣算,必須用最大值來計算。
我們知道穩壓二極管工作在反向擊穿區,見第一幅圖的第三象限。它的曲線特點是:電流變化很大,但電壓變化很小,這就是它的穩壓原理。不過要注意:此時二極管處于反向接法,即穩壓二極管工作在反向電壓下。
設,上圖中的穩壓二極管穩定電壓是12V,最大穩定電流是25毫安。我們先把電阻R2開路,來計算R1的值。

故R1取值為820歐,功率為0.51W,取標稱值1W。
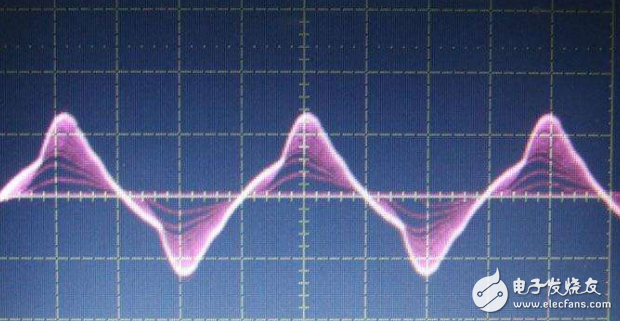
此時穩壓二極管兩端的波形是什么樣的?就是波形圖中下部的綠色部分。在這里,穩壓二極管起到給半波直流波形削頭的作用。
現在,我們把R2接入,于是流過穩壓二極管的電流變小了。但只要流過穩壓二極管的電流仍然在它的穩定電流范圍之內,則穩壓二極管的穩壓作用就能維持。
設穩壓二極管的最小穩定電流為5毫安,則流過R2和R3的電流為25-5=20毫安。故R2+R3的取值為:

實際上,我們看到R2+R3的和只要不低于600歐即可,故R2+R3的實際值會大于計算值。具體取值與我們的解答無關,此處忽略。
我們看到,晶體管T1的集電極也有一只穩壓二極管D2,它的用途同樣也是削幅,使得輸出到后級的脈沖幅度最高值就等于穩壓二極管的穩定電壓。
工頻干擾使我們在開發設計之中常見的現象,工頻干擾為何會產生?如何解決呢?下文給你帶來詳細介紹。
示波器的低頻輸入阻抗是很高的。對于高頻信號,由于輸入電容的容抗下降,輸入阻抗就會下降。由于示波器探頭的饋線較長,所以,雖然外層是具有屏蔽層的同軸電纜,但對于丁頻這么低的頻率,幾乎沒有屏蔽作用。于是,對于工頻來說,探頭的饋線就相當于“天線”,會撿拾工頻電磁波中的電場干擾,在顯示屏上顯示出工頻干擾的波形,且幅度很大(可達十幾伏特)。
如果將探頭的探針與地線短接,則顯示屏上的波形就會消失。這是因為線間的阻抗下降到零阻抗。實際上,凡是低頻高阻抗的測量儀器,都會對工頻干擾產生反應(T頻干擾本身也是很強的干擾源)。
那么,在用示波器進行測量時,工頻干擾對測量結果會有什么影響呢?對一般的被測電路而言,其輸出阻抗大多比較低,故工頻干擾的影響一般反映不出來。即當示波器的探頭與輸出阻抗較低的被測電路相連時,顯示屏上的工頻干擾波形會消失。絕大多數的情況下是這樣的。但是,如果被測電路測試點的阻抗很高肘(例如高達幾百千歐姆),這種影響就會變得顯著了。例如要測量一個場效應管放大器輸入端的波形,當把測試點選為其輸入耦合電容之后的場效應管的柵極,盡管放大器的輸入端所接的信號源的阻抗可能很低。但是,由于場效應管放大器的輸入電容的容量一般很小(一般為零點幾微法或者更小),對于工頻來說,阻抗很高,場效應管的輸入阻抗也很高,此時工頻干擾的影響將會使測量無法進行,必須采取某些措施來消除工頻干擾的影響。
應該說數字濾波器可以有效減小50Hz工頻的干擾,完全消除是不可能的。以20ms為最小單位的整倍數周期濾波,可以有效減少工頻的干擾。
我們知道,設計數字濾波器,和模擬濾波器的實質,其實就是求一組系數,逼近要求的頻率響應。模擬濾波器已經很成熟,因此,數字濾波器的設計,將S平面映射到Z平面就型。采用雙線性變化法映射,可以避免多值映射產生的混疊現象。但這有個問題就,模擬域和數字域兩者的角頻率是非線性的。
平滑濾波器是數字濾波中較早使用的方法,該算法簡單,處理速度快,濾波效果較好,但存在明顯不足,通帶較窄,影響有用信號的分析,有嚴重削峰,設計方法略。
陷波器,是IIR數字濾波器,有signal notch 濾波器,即單一頻率陷波器,以及comb notch濾波器,即梳妝濾波器。
陷波器是無限沖擊響應(IIR)數字濾波器,該濾波器可以用以下常系數線性差分方程表示:

式中: x(n)和y(n)分別為輸人和輸出信號序列; ai和bi為濾波器系數。
對式(1)兩邊進行z變換,得到數字濾波器的傳遞函數為:
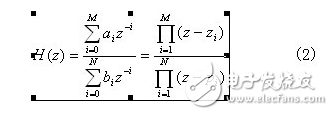
式中: zi和pi分別為傳遞函數的零點和極點。
由傳遞函數的零點和極點可以大致繪出頻率響應圖。在零點處,頻率響應出現極小值;在極點處,頻率響應出現極大值。因此可以根據所需頻率響應配置零點和極點,然后反向設計帶陷數字濾波器。
下一篇: PLC、DCS、FCS三大控
上一篇: 鉗位電路介紹_鉗位電


