發布日期:2022-04-26 點擊率:728

自2019年DYNA4成為Vector產品體系的成員,Vector致力于基于行業標準構建DYNA4在虛擬駕駛仿真領域所需的靜態環境仿真、動態環境仿真、測試環境集成和測試數據等,從而更好地滿足ADAS/AD測試驗證需求以及與第三方工具平臺的耦合;同時也對車輛動力學仿真、動力總成仿真和易用性等多方面功能特性進行優化改善,如與CANoe之間的便捷集成。
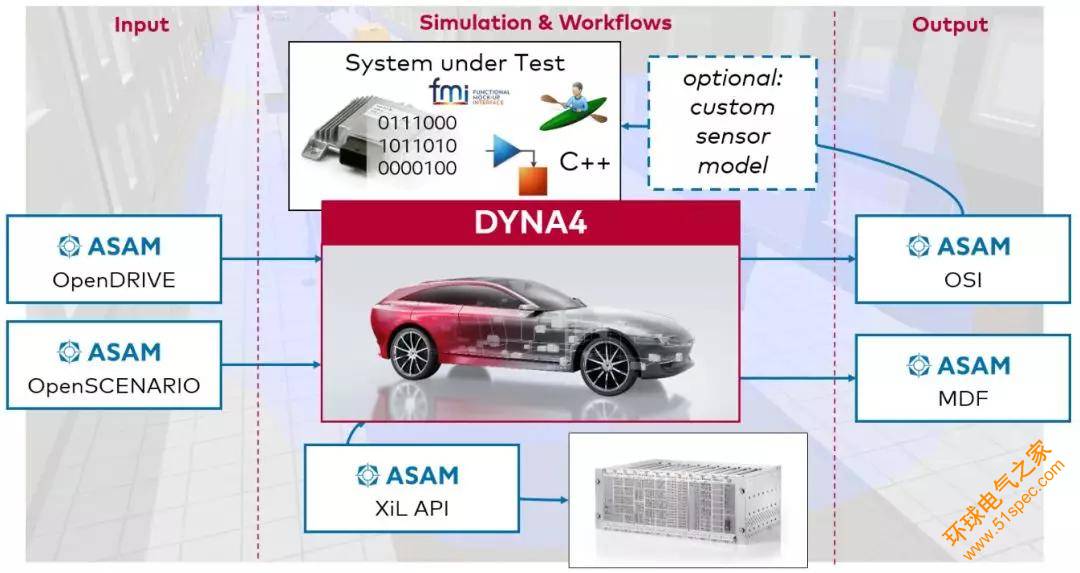
圖1 虛擬駕駛仿真測試ASAM標準接口
DYNA4 4.0版本主要新特性包括:
01 滿足不同應用場景的產品組成、可選Option和授權License
- DYNA4 Studio面向模型和場景編輯;DYNA4 Run用于編譯模型的執行,如集成在CANoe、第三方工具或云平臺環境中運行相關仿真場景。
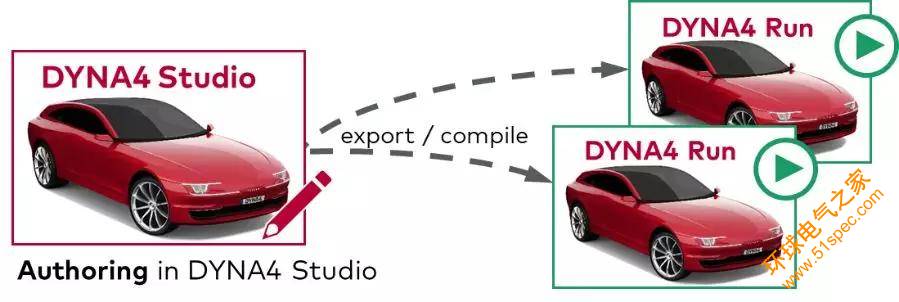
圖2 全新產品組成:DYNA4 Studio和DYNA4 Run
- 基于不同應用場景可靈活配置模塊和組件:
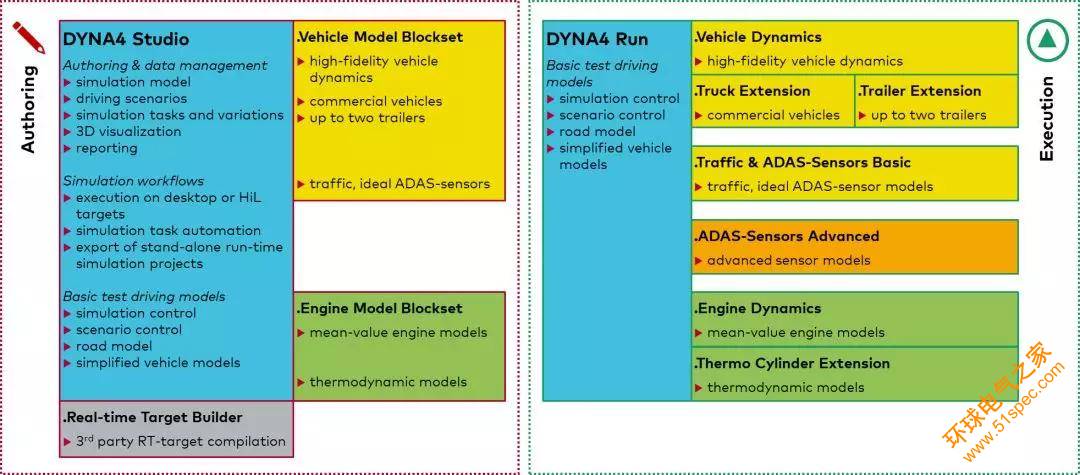
圖3 DYNA4 Studio可選Blockset和DYNA4 Run可選Option
- 全新的License激活方式,典型應用配置如下:
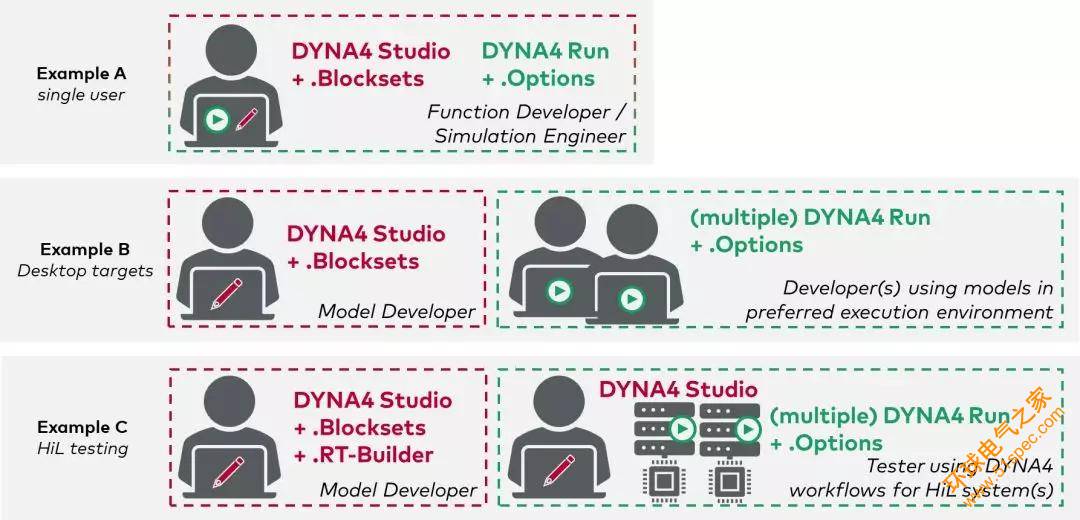
圖4 DYNA4 Studio和DYNA4 Run滿足不同應用場景的典型配置
02 OpenDRIVE標準道路網絡相關新特性
- 改善通過在線地圖和現實道路掃描數據創建符合OpenDRIVE的道路網格(GPX格式):
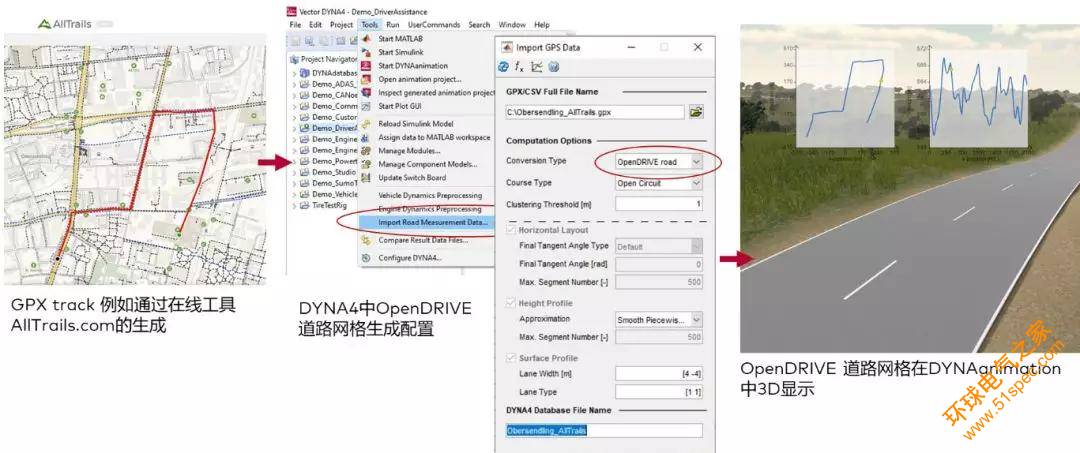
圖5 在線地圖數據生成DYNA4中道路網絡示例
- 支持世界大地測量系統WGS84的參考地理坐標道路網絡,用作仿真GPS接收和Car2X的功能應用:
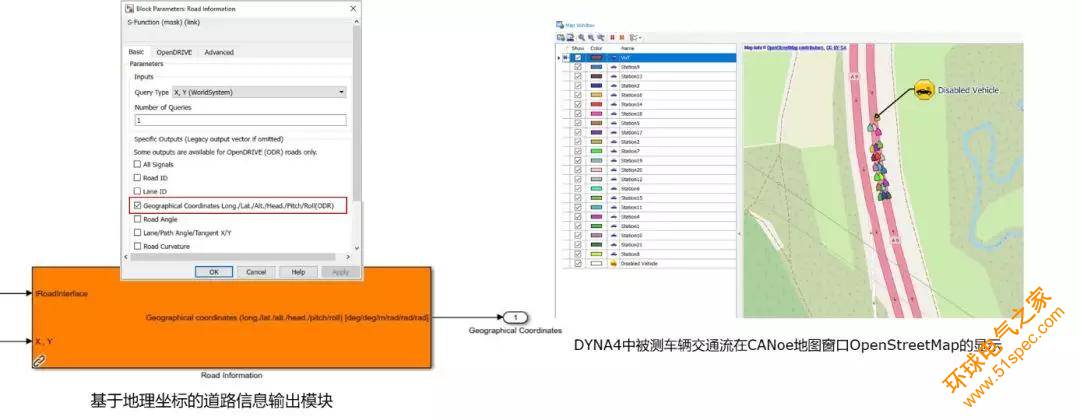
圖6 DYNA4參考地理坐標的道路網絡聯合CANoe中OpenStreet地圖中的應用
- 可靈活配置參數,自動生成滿足道路網絡支持OpenDRIVE標準:

圖7 DYNA4中道路自動生成配置參數選項
03 ADAS/AD傳感器增強
- 增加單個垂直掃描激光雷達傳感器模型;
- 基于GPU傳感器模型的確定性渲染優化:每個傳感器幀速率可配置、每個傳感器的時間偏移可調,滿足圖像拼接和目標檢測相關應用;

圖8 環視攝像頭傳感器參數配置和成像效果示意
04 DYNAanimation中3D顯示優化
- 逆光下路標和交通標識的優化,車輪顯示動畫優化等:
圖9 DYNAanimation中顯示效果優化
- 改善仿真模型和DYNAanimation動畫顯示關系:改進動畫組件的靈活性和可用性,仿真啟動延遲可選擇性的配置在動畫顯示工程加載為止;
05 更優的流程和更靈活的參數化配置
- CANoe:優化DYNAanimation啟動加載,提供支持DYNA4獨立在CANoe中運行demo工程;
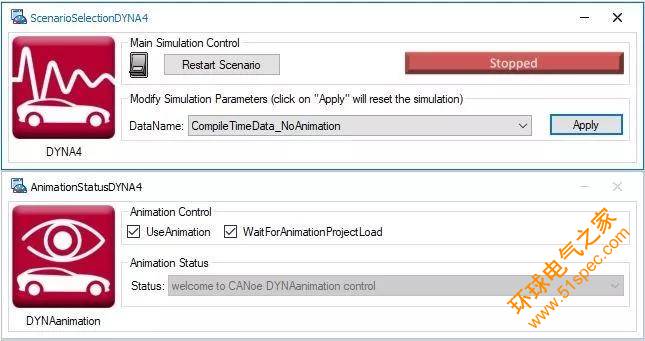
圖10 DYNAanimation在CANoe中的界面
- 全新的基于Windows平臺的Simulation target,可脫離MATLAB/Simulink環境的運行仿真;
- 支持編譯模型的參數化,一鍵編譯用作車輛編隊形式(Multi-ego)的多個相同模型;
- 仿真車輛參數和場景仿真參數編譯為獨立文件。
其它更多新特性和優化易用性(如用戶自定義下拉菜單顯示需要的Simulation Target)詳見DYNA4手冊。
圖11 用戶自定義Simulation Target下拉選項示意
下一篇: PLC、DCS、FCS三大控
上一篇: MATLAB和Simulink在航


