當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:59
機器人(robot)一詞,最早出現在1920年捷克科幻作家恰配克的《羅索姆的萬能機器人》中,原文作“Robota”,后來成為英文中通行的“Robot”。更科學的定義是1967年由日本科學家森政弘與合田周平提出的:“機器人是一種具有移動性、個體性、智能性、通用性、半機械半人性、自動性、奴隸性等7個特征的柔性機器。”
國際機器人聯合會將機器人分為兩類,工業機器人和服務機器人。工業機器人是“一種應用于工業自動化的,含有三個及以上的可編程軸的、自動控制的、可編程的、多功能執行機構,它可以是固定式的或移動式的”。服務機器人則是“一種半自主或全自主工作的機器人,它能完成有益于人類健康的服務工作,但不包括從事生產的設備”。從定義可見,分類的標準是機器人的應用場合。
一般的機器人都由機械結構、控制驅動系統、感知系統、交互系統等部分組成。
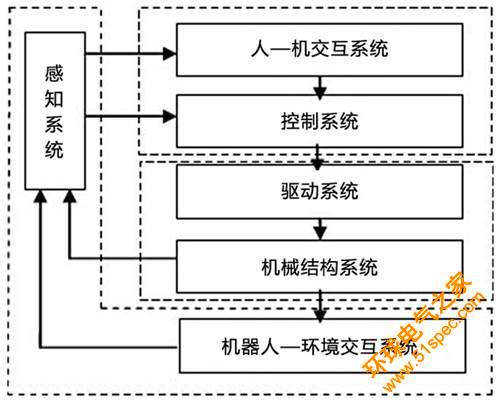
圖1 一般機器人的系統構成
近年來工業機器人供應量在大多數行業都呈現出上漲的態勢。而服務機器人發展歷史較短。其在功能上的主要不同體現在兩個方面:一是與人的溝通協作;二是在復雜環境下代替人的部分工作。
發展現狀
仿生機器人
“機器人”這個名稱本身就帶有仿生學色彩,目前已有不少類人機器人、機器狗等產品問世,這些產品大部分只具有娛樂功能。然而2013年底在美國佛羅里達州Homestead舉辦的DARPA機器人挑戰賽則將仿生機器人推到了救災救援的應用領域。該賽事設計了通過布滿障礙物的門、崎嶇路行走、破拆墻面、連接消防栓、轉動閥門等八項比賽任務,吸引了來自世界各地的16支仿生機器人團隊。從比賽任務的設置可以看出,比賽非常鮮明地突出了仿生機器人在救災救援方面的應用。經過激烈的角逐,日本Schaft公司生產的HRP-2機器人最終奪魁。來自弗羅里達的一家非盈利機構和卡耐基-梅隆大學分獲二、三名。值得一提的是,Schaft機器人已在早些時候被Google收購,而第二、四名團隊所用的Atlas機器人也來自Google旗下的BostonDynamics。作為世界上最具創新實力的科技公司之一,Google的收購行為也表明了仿生機器人具有一定的市場前景。

圖2 HRP-2機器人和Atlas機器人
機器人在救援救災方面,與人類相比具有巨大的優勢,可以極大提高搜救效率和減少人員傷亡。但同時,從該賽事也可以看出,所有的機器人在比賽中都出現過故障,甚至有3支代表隊最終得了零分。即使完成比賽,機器人的動作也顯得呆板遲鈍。這些都表明目前的仿生機器人技術還不成熟,具有很大的發展空間。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


